The work of Dr. Koç and his collaborators titled “RadGT: Graph and Transformer-based Automotive Radar Point Cloud Segmentation” has been published in IEEE Sensors Letters.
In this study, we delve into the world of automotive radar data processing, leveraging advanced techniques such as graph-based methods and Transformers. Our research addresses critical challenges in radar point cloud segmentation, paving the way for enhanced accuracy and efficiency in autonomous driving systems.
With the rising significance of graph and transformer-based algorithms, the incorporation of these techniques into automotive radar data analysis signifies a substantial advancement in the industry. Through the fusion of these methods, we have attained exceptional outcomes, expanding the horizons of what can be achieved in radar point cloud segmentation.
The implications of our work extend far beyond the realm of autonomous vehicles. The advancements contribute to the broader landscape of computer vision and signal processing, opening new avenues for research and development in various domains.
The paper can be accessed [here].
Abstract:
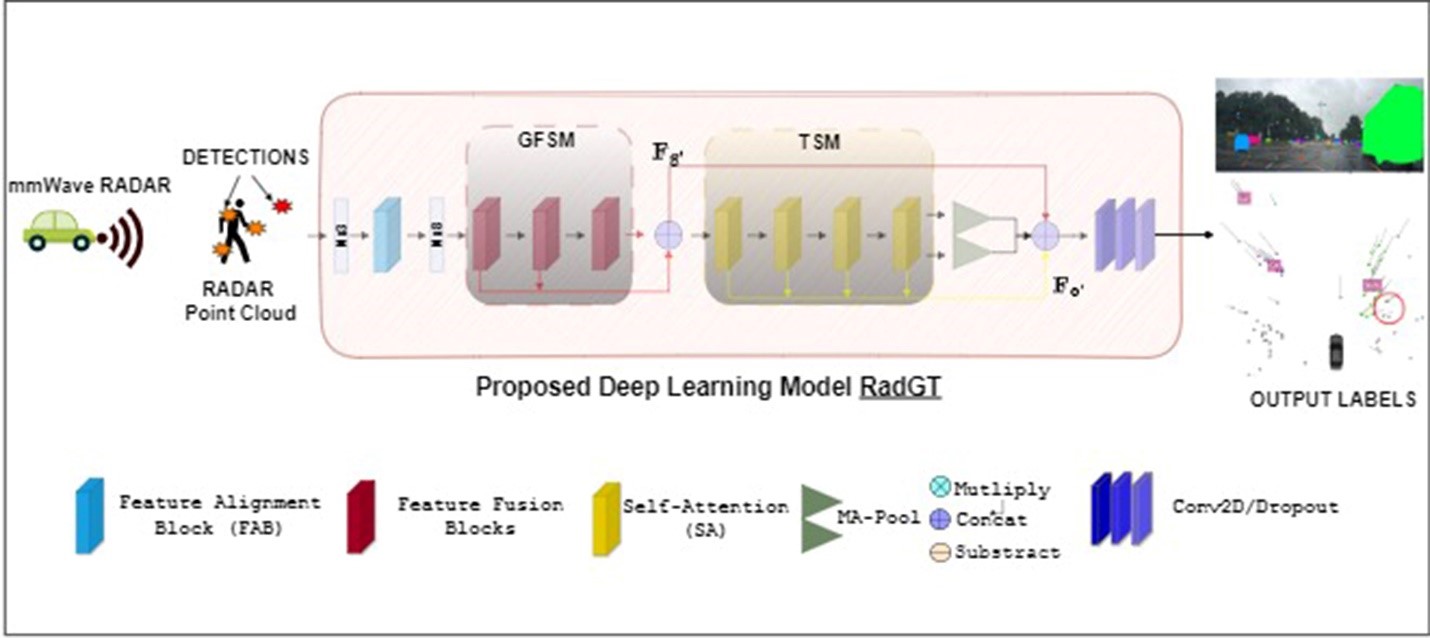
The need for visual perception systems providing situational awareness to autonomous vehicles has grown significantly. While traditional deep neural networks are effective for solving 2-D Euclidean problems, point cloud analysis, particularly for radar data, contains unique challenges because of the irregular geometry of point clouds. This letter proposes a novel transformer-based architecture for radar point clouds adapted to the graph signal processing (GSP) framework, designed to handle non-Euclidean and irregular signal structures. We provide experimental results by using well-established benchmarks on the nuScenes and RadarScenes datasets to validate our proposed method.